2013. 7. 24. 21:55ㆍC.E.O 경영 자료
우주탐사용 유인원 로봇 등장
지디넷코리아 이재구 국제과학전문기자 입력 2013.07.24 17:21 수정 2013.07.24 18
다음 번 우주 행성 탐험에는 네발로 걷는 유인원로봇이 사용될 전망이다. 독일의 한 업체가 이런 용도로 개발된 43점(43point)식 압력센서를 적용한 유인원로봇, 또는 4발 휴머노이드를 만들어냈다.
씨넷은 23일(현지시간) 독일 인공지능연구센터의 아이스트럭트(iStruct)프로젝트 결과 내놓은 유인원로봇을 소개했다.
이 네다리로 걷는 유인원 로봇은 독일 인공지능연구센터와 브레멘대가 공동 개발한 것으로 4개의 발을 사용하는 로봇의 장점을 보여준다. 이 로봇은 발과 발목의 움직임을 모니터하기 위해 많은 정밀센서 등 첨단기술을 사용하고 있다.
그 결과 균형과 위치를 잘잡을 수 있게 돼 거의 사람이나 다른 네발동물과 다름없이 균형잡힌 동작을 할 수 있게 됐다. 이 로봇은 앞으로도, 뒤로도, 옆으로도, 그리고 대각선으로도 자유자재로 아주 부드럽게 움직일 수 있다.
|

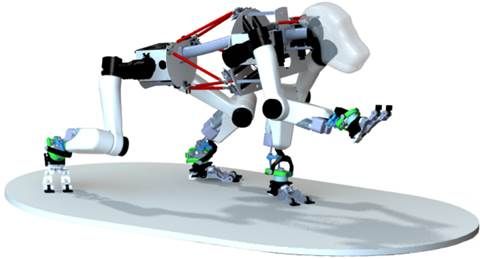
유인원같은 로봇의 옆부분 모습은 인공척추와 센서를 갖춘 발을 보여준다. 로봇이노베이션센터는 이 기계가 우주로봇연구영역의 일부로 개발됐다고 밝혔다. 아이스트럭트 프로젝트는 지능로봇외계탐사를 위한 로봇개발의 일환이다.
프로젝트 결과 나온 생체학에서 영향을 받은 유인원로봇은 비구조적이고 평평하지 않은 거친 지형에서 움직일 수 있는 혁신적인 운동 컨셉트를 포함한다. 재설정시스템을 포함하는 다기능 프로젝트도 포함돼 있다.
|

유인원로봇은 발목점(ankle-joint) 메커니즘과 압력센서를 가진 발을 이용해 역동적으로 걷을 수 있다. 이 로봇은 생체공학적 지능을 다리-발-발목 연결 구조에 크게 의존하고 있다.
발뒷꿈치에 있는 거리센서는 뒷꿈치가 땅을 찰 때를 예상하게 해 준다. 디지털 3축 가속계는 발구조의 방향을 인식하게 해 준다. 디지털 자석 각도엔코더와 수많은 센서들은 발과 발목 축 구조의 모든 움직임을 모니터 한다.
|

|

.
|
'C.E.O 경영 자료' 카테고리의 다른 글
| (수)억만장자의 공통점-주는 능력이 탁월하다. (0) | 2013.07.24 |
|---|---|
| 투기적 거품에 '끝'이란 없어… 잠시 줄었다가 또 부풀어 오를 뿐 (0) | 2013.07.24 |
| 노력만한 지름길도 없다. (0) | 2013.07.23 |
| [산으로 가는 청년창업]② 특허 비용 탓에 좌절하는 청년들 (0) | 2013.07.23 |
| 고액 주식투자 상위 1%가 시가총액의 82% 보유 (0) | 2013.07.23 |