2015. 8. 9. 19:09ㆍC.E.O 경영 자료
우주와 행성을 탐낸 인류는 로봇에 욕망을 실어 보냈다. 지구와 가장 가까운 달을 시작으로 화성, 목성의 위성, 소행성 등이 우주로봇의 행선지였다. 우주선이나 위성에 연료를 공급하거나 고장난 부분을 수리하고, 재충전시키는 것도 우주로봇의 역할이었다. 때로는 착륙에 실패하거나 망가져 원대한 꿈이 좌초할 때도 있었지만 우주를 정복하고 제2의 지구를 찾기 위한 우주로봇의 노력은 지금도 계속되고 있다. 우주로 여행길을 떠났던 대표적인 로봇과 미래의 우주로봇을 함께 만나 보자.
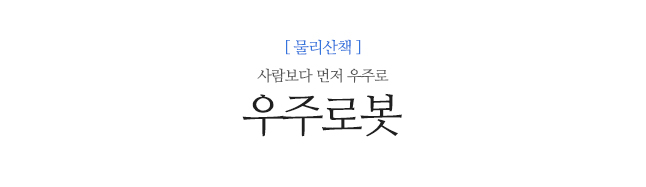
큐리오시티의 지상에서의 모습. 우주로봇은 사람이 가기 어려운 우주로 먼저 떠난다.
달 탐사의 선구자들
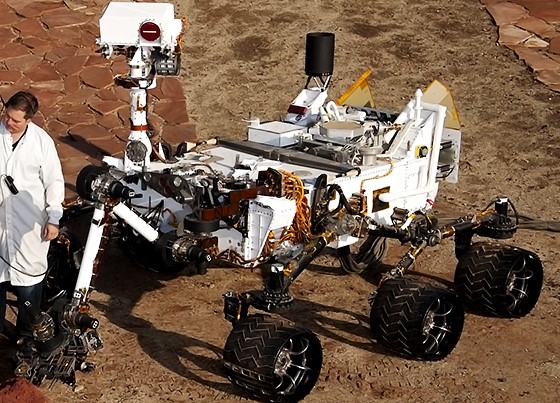
러시아의 달탐사 우주로봇, 루노호트(Lunokhod).
러시아의 달탐사 우주로봇, 루노호트(Lunokhod).
최초로 외계의 행성 표면을 이동한 로봇. 1970년대 소련에서 개발된 달 탐사 로버. 루노호트 1호는 지구에서 원격 조종으로 달 표면을 10.5km 이동했고 루노호트 2호는 1973년 37km 이동하는 데 성공했다. 달 표면의 과학조사와 원격 조종 활동이 주요 미션. 루노호트 1호는 길이 2.3m에 무게 840kg, 속도는 시속 2km. 루노호트 2호는 1.7×1.6×1.35m 크기에 무게와 속도는 1호와 동일. 차체는 원통 모양이고 지붕이 열리는 구조. TV카메라, X선스펙트럼미터, 전복방지자동장치 등이 탑재됐다.
일본 달 탐사 우주로봇, Micro5.
일본 달 탐사 우주로봇, Micro5.
일본 우주항공연구개발기구(JAXA)가 2015년경 발사할 예정인 달 착륙선 셀레느-2에 실려 갈 달 표면 탐사 및 자원 탐사 로버. 1990년대 후반부터 개발중. 80×65×20cm로 매우 작은 크기에 무게는 29.5kg. 태양열 전지가 주요 동력원이며 4개의 바퀴와 조작할 수 있는 액티브 팔 1개로 이뤄져 있다.
미국의 달 유인탐사 로버, LRV(Lunar Rover Vehicle)
미국이 1971년부터 2년 동안 아폴로 15~17호에 실어보낸 유인탐사용 로버. 3.0×2.3×1.1m의 크기로, 달에 착륙한 우주인들이 탐사를 위해 타고 다닌 일종의 우주자동차. 아폴로15, 16, 17호와 함께 달에 갔던 LRV는 각각 27.76km, 26.55km, 35.89km를 주행했다.
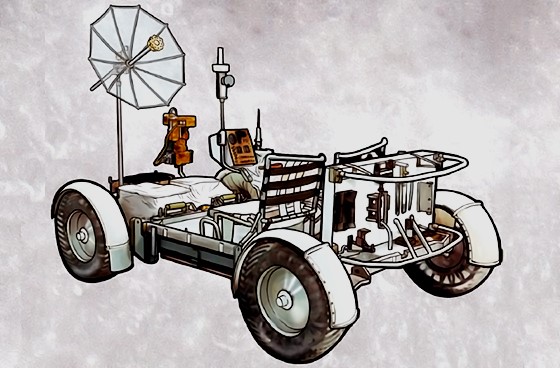
미국의 달 유인탐사 로버, LRV(Lunar Rover Vehicle)
소행성 · 혜성 탐사 로봇
소행성 탐사의 상징 하야부사
정식명칭이 MUSES-C인 일본의 소행성 탐사선으로 일본어로 ‘매’라는 의미다. 2003년 발사해 지구에서 약 3억km 떨어진 소행성 이토카와의 샘플 채취에 성공해 2010년 6월 지구로 귀환했다. 무게 약 500kg에 크세논 이온엔진 4기를 장착했다.JAXA는 하야부사를 통해 소량의 연료로 우주를 장기간 비행하는 기술을 확보했다. 이온 엔진은 1000시간 이상이나 가동했다. 2010년 6월 13일 대기권에 진입했으며 본체는 모두 불타 소멸되고 캡슐만이 호주 우메라 사막에 착륙해 회수됐다.
유럽의 혜성 탐사선, 로제타(Rosetta)
혜성 67P/츄르유모프-게라시멘코(Churyumov-Gerasimenko)를 연구하기 위해 2004년에 발사됐다. 2014년 혜성의 핵 표면에 착륙할 예정이다. 착륙 시 튕겨져 나가는 현상을 막는 장치와 안전하고 확실하게 착륙하기 위한 드릴 시스템을 장착했다.

소행성 탐사의 상징 하야부사

유럽의 혜성 탐사선, 로제타(Rosetta)
미국의 화성탐사 로봇3형제
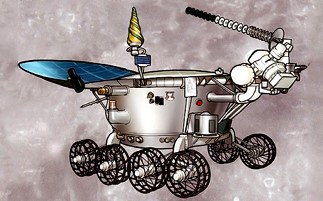
소저너 (1997)

소저너
1996년 12월 4일 발사된 화성탐사선 마스패스파인더에 실린 탐사 로봇. 무게 10kg, 길이 63cm×높이 28cm, 속도는 초속 1cm이다. 동력원은 태양에너지. 입체영상기(IMP), 대기분석 장비(ASI/MET), 알파입자 X선분광기(APXS)가 실렸다. 활동기간은 1주일로 예상했으나 실제론 6주 이상 활동했다. 소저너가 탐사활동을 할 때 패스파인더는 기지와 지상관측소 역할 수행하여, 지구에서 받은 명령을 패스파인더가 소저너에 전달하고 소저너가 탐사한 자료를 지구로 전송했다. 개발 기간과 비용은 각각 3년에 2억 8000만 달러(약 3200억 원).
착륙 지점인 아레스 발리스 평원이 300만 년 전쯤 발생한 홍수로 침식작용을 받은 사실을 알아내 물이 존재했다는 점을 밝혔다. 또 소저너의 화학분석을 통해 규산염을 다량 함유한 암석과 유황이 풍부한 암석이 존재한다는 사실을 밝혀냈다. 과거 화산활동 또는 화성의 지각변동 가능성을 예측했다.
오퍼튜니티
2003년 7월 8일에 발사돼 이듬해인 2004년 1월 25일 화성 메리디아니 평원에 착륙한 탐사 로봇. 길이 1.6m에 무게 약 175kg, 움직이는 속도는 초속 5cm이다. 1월 4일 착륙한 ‘스피릿’과 쌍둥이 로봇이다. 예상 탐사 기간은 90화성일(1화성일=24시간 37분 23초)이었지만 지금도 활동중이다. 9대의 카메라와 과학연구에 필요한 현미경, 적외선 분석장치, 로봇팔을 장착했다.
어깨·팔꿈치·손목 3개의 관절로 이뤄진 로봇팔은 유연하게 움직이면서 화성의 토양을 채취한다. 팔에 달린 카메라는 360˚회전 촬영해 암석 표면을 현미경 수준으로 확대한 컬러 영상을 얻는다. 화성 토양 분석 결과 화성 표면에 적철석이 존재하는 것을 밝혀냈다.과거에 물이 존재했다는 가설을 만든 계기가 되었다. 2004년 1월 21일부터 쌍둥이 로봇 스피릿에 에러가 발생하고 오퍼튜니티는 관절 이상이 발생하는 등 다양한 우여곡절을 겪었다. 오퍼튜니티는 지금도 여전히 화성 사진을 지구로 전송 중이다.
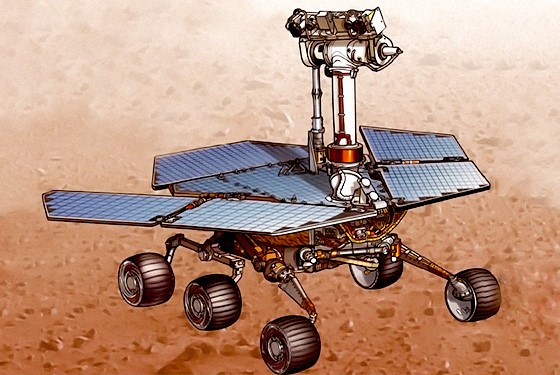
오퍼튜니티
큐리오시티
2012년 8월 6일 착륙한 NASA의 최신 화성 탐사로봇. 기존 화성 탐사로봇과의 가장 큰 차이점은 동력원으로, 태양전지판이 아닌 핵에너지(플루토늄-238)를 동력으로 사용한다. 무게 900kg에 길이는 약 3m, 높이 2.1m 폭 2.7m, 이동 속도는 약 초속 4cm이다. 17개의 카메라가 달려 있으며 2.1m 크기의 로봇팔을 보유했다. 57kg에 이르는 첨단 과학센서 및 실험장비도 10종류가 있다. 로봇팔에 달린 드릴을 이용해 암석을 약 5cm 뚫어 성분을 분석한다. 착륙 지점은 화성의 게일 크레이터. 화학카메라 ‘켐캠(ChemCam)’이 발군으로, 레이저·망원경·카메라·분광사진기로 구성된 켐캠은 암석에 100만W의 적외선 레이저를 발사해 최대 7m 밖의 암석성분을 파악, 암석에 피어오른 불꽃을 촬영한 뒤 빛의 파장을 분석한다.
운용 기간 1화성년(687일) 이상으로, 총 이동 가능 거리 최대 20km로 예측된다. 참고로 스피릿·오퍼튜니티는 발사 당시 임무 기간은 3개월, 하루 이동 거리는 1.6km였다. 4.8kg의 플루토늄-238을 원료로 하루 2700Wh의 전력을 생산하는 덕분에 가능한 일이다. 이는 스피릿에 쓰인 태양전지의 3배에 달하는 발전량이다. 착륙 지점은 화성 적도 아래 부근 게일 분화구(크레이터)로, 물이 흐른 흔적을 발견할 가능성이 가장 큰 지역인 동시에 생명체 존재의 단서를 발견할 최적의 장소로 꼽힌다. 주요 임무는 화성 생명체 존재 여부 파악, 기온·습도·바람 등 기후관측 장비로 화성 대기 분석. 화성 암석 및 토양 채취 분석이다.
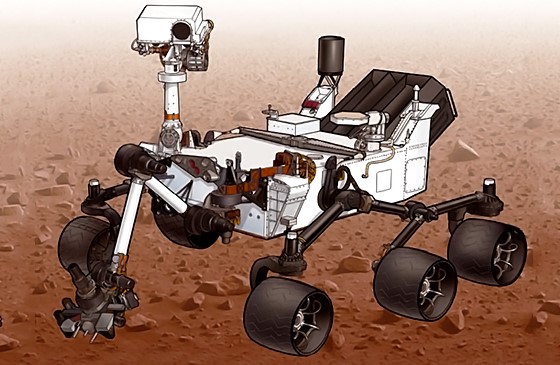
큐리오시티
다른 화성 우주로봇들
소련의 실패, Prop-M

구소련의 Prop-M
구소련이 1971년과 1973년 세계 최초로 개발한 화성탐사 로버. 화성탐사선 ‘마스 2호(Mars 2)’, ‘마스 3호’가 각각 탑재했다. 2호는 화성 표면에 추락해서 실패했고 3호는 착륙했지만 1분도 되지 않아 통신이 두절돼 사실상 실패한 화성 탐사 로버의 대명사가 됐다.
인류 최초의 화성 착륙 탐사 로봇, 바이킹(Viking)
미국 NASA가 1975년에 발사해 1976년 ‘인류 최초의 화성 착륙 탐사로봇’ 타이틀을 거머쥐었다. 바이킹 1호와 2호로 나뉘어 발사됐으며 2.3t 무게의 궤도선과 1.12t 무게의 착륙선으로 구분된다. 바이킹의 목적도 역시 화성의 생명체 탐사. 탐사선에 달려있는 로봇팔로 화성 토양을 채취, 광합성 실험과 신진대사기능 실험, 가스교환 실험 등을 수행했다. 당시 착륙선의 실험에서는 유기물 검출장치에 아무것도 나타나지 않아 생명체 흔적을 찾는 데는 실패했다. 그러나 바이킹은 스스로 이동하지 않고 한 곳에만 고정된 탐사로봇이었다는 점에서 한계가 있었다
미국의 화성 착륙 탐사 로봇, 바이킹(Viking)
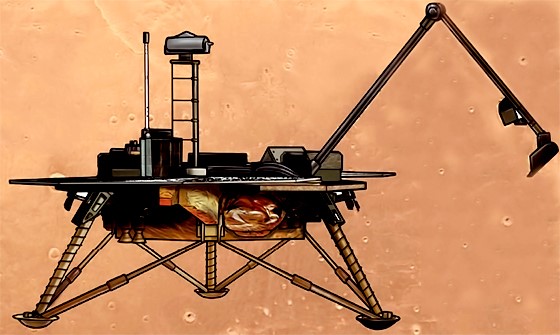
비운의 유럽 화성 탐사 로봇, 비글2
유럽우주기구(ESA)가 만든 유럽의 화성 탐사 로봇. 찰스 다윈이 탔던 연구선 이름을 따 ‘비글(Beagle)2’로 이름붙여졌다. 지난 2003년 유럽우주기구가 발사한 화성탐사선 마스 익스프레스에 실렸다가 그 해 12월 화성 상공에서 분리됐다. 에어백에 실려간 비글2는 화성 생명체 탐사에 나설 예정이었지만 모선에서 분리된 직후 지구와 교신이 끊겼다. 무게 67kg에 불과한 소형 탐사 로봇. 착륙 당시 먼지 폭풍때문에 충격이 컸을 것으로 예상되며 그 여파로 안테나를 펼치지 못했다.
드릴링 시스템으로 압도하는 엑소마스(ExoMars)
유럽우주기구의 화성 표본 채취 임무를 위한 로버. 당초 2009년 NASA와 협력 연구를 하기 위해 발사키로 했으나 2018년으로 발사가 연기됐다. 길이 1.7×폭 1.6×높이 1.5m 크기에 최대 무게 260kg으로 예상된다. 임무 기간은 7개월 이상으로 예상하고 있다. 엑소마스는 2m 깊이의 화성 표면을 뚫고 들어갈 수 있는 최첨단 드릴링 시스템을 장착할 예정이다. 이에 따라 화성 지표를 중심으로 이뤄졌던 화성 탐사가 지표면 아래 지질까지 가능해질 것으로 기대된다.

유럽 화성 탐사 로봇, 비글2

유럽우주기구의 엑소마스(ExoMars)
만들거나 고치거나, 자유유영 로봇
우주왕복선의 친구, 에어캠-스프린트(AERCam-Sprint)
미국이 1997년 우주왕복선 임무의 일부로 개발했다. 지름이 약 35.6cm에 달하는 구 모양의 차체는 우주왕복선 선실 내에서 원격으로 조정할 수 있으며 우주왕복선 외부도 조사할 수 있다. 2003년 콜롬비아호 참사 이후 운영되지 않았으며 향후 미래 우주 임무에서 운영하기 위해 후속 모델이 개발중이다.
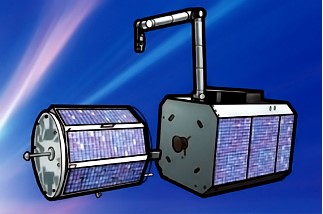
위성 수명 연장의 꿈, 오비탈익스프레스(Orbital Express)
2007년 3월부터 석 달 동안 진행된 우주실험용 우주로봇. 오비탈익스프레스는 아스트로(Astro)라는 서비스 위성이 넥스트샛(NextSat)이라는 시험위성을 수리하는 것을 가정해 진행된 실험의 이름이다. 아스트로에는 위성 자세제어용 연료인 히드라진 추진체 136kg과 위성을 붙잡기 위한 로봇팔이 달려 있다. 아스트로는 넥스트샛에 도킹한 후 우주에서 연료를 주입하고 로봇팔로 배터리를 교체했다.
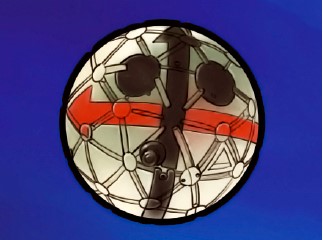
에어캠-스프린트(AERCam-Sprint)

오비탈익스프레스(Orbital Express)
위성 맞춤형 서비스에 우주쓰레기 처리까지, DEOS
독일 항공우주연구소(DLR)의 지구 궤도상 서비스 로봇 및 시험위성 관련 연구로 지난 2008년부터 2011년까지 운영된 프로그램. 2004년부터 진행된 TECSAS 프로그램과 연계됐다. 저궤도상의 우주왕복선에 대한 연료 주입이나 수리 등 전문 서비스를 하는 로봇으로 개발됐다. 이와 함께 위성 궤도에 떠다니는 우주쓰레기도 처리할 수 있게 업그레이드가 이뤄질 예정이다.
우주정거장의 만능 수리공, 캐나다암(Canadarm)
캐나다가 완성한 자유유영 로봇의 시초. 거대한 규모의 로봇 시스템으로 우주정거장의 조립과 유지, 장비와 부속품의 전달 등을 돕기 위해 만들었다. 캐나다의 손이라고도 불리는 이 로봇은 우주선의 도킹을 지원하거나 위성 등 거대한 구조물을 나를 수 있도록 설계됐다. 산업 현장에서 무거운 물건을 들어서 조립하거나 사람이 할 수 없는 정교한 작업을 하는 산업용 로봇과 견줄 수 있다.
DEOS
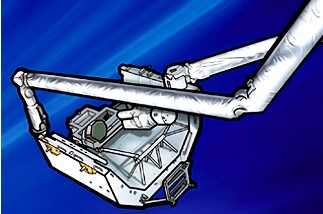
캐나다암
미래형 우주 로봇
인공지능 무인잠수정, 뎁스엑스(Depth X)
빌 스톤 미국 국립표준기술원 자동제어 전문가가 제시한 컨셉트 형태의 인공지능 무인잠수정 로봇이다. 원래 지구 깊숙한 곳을 탐사하기 위해 고안했지만 목성의 위성인 유로파의 얼음 심연에서 외계 생명체를 찾아낸다는 포부도 세웠다.

뎁스엑스(Depth X). 잠수정 형태의 컨셉이다.
NASA의 지원을 받아 다양한 테스트를 진행하고 있다. 뎁스엑스는 제한된 환경에서 스스로 판단해 움직이는 로봇이다. 54개의 초음파 센서, 관성 안내장치, 가속도계, 깊이측정기를 사용해 주변환경을 확인한다. 이를 컴퓨터에 입력해 주변 환경을 3D 디지털 지도로 제작하고 어디로 갈지 결정하게 된다. 목성 위성 유로파는 표면 온도가 영하 160℃인 얼음으로 덮여 있지만 7km의 얼음층을 뚫고 들어가면 지구의 바닷물보다 많은 양의 물이 있을 것으로 예상되고 있다. 뎁스엑스는 인류가 아직 한번도 가보지 못한 유로파의 해저를 탐사, 외계 생명체를 찾는 것이 목표다.
화성 날아다니는 소형 비행체, 엔토몹터(Entomopter)
로버트 미켈슨 미국 조지아공대 교수팀이 개발중인 화성 탐사용 초소형 비행체 ‘엔토몹터(Entomopter)’는 신기술을 바탕으로 화학에너지를 통해 자발적으로 날갯짓을 한다. 이는 몸통 부위에 있는 왕복 운동을 위한 화학 근육에 연료를 주입한 후, 화학 반응을 일으켜 가스를 발생시키고 이를 이용해 날개를 움직이는 방식이다.

엔토몹터(Entomopter)
최소 3분 이상 비행하는 것을 목표를 개발중이지만 현재까지는 공중에서 15초간 비행이 가능하다. 비행체는 기존 로버(오퍼튜니티, 큐리오시티 등)가 닿지 못했던 곳을 자유롭게 접근할 수 있다. 화성에 가게 된다면 기지 역할을 하는 소형 로버에 엔토몹터가 실려 간다. 원격 조종에 의해 탐사 목표 지역에 접근, 샘플을 채취해 다시 로버로 돌아오는 식이다. 로버로 돌아오면 분석을 위해 채취한 샘플을 로버에 주입한다.
정찰, 탐사, 수송… 마침내 거주 위한 우주로봇
NASA가 그리고 있는 미래의 우주로봇. 지금까지는 단순히 표면 탐사가 목적이었지만, 앞으로는 인류가 실제로 접근하고 착륙해서 살 수 있도록 돕는 우주로봇을 그리고 있다. 기본적인 형태는 모두 비행체다. 지구 고도 30km 이상 지역에서 테스트가 진행되며 자외선에 대응하기 위해 날개가 더 커지기도 한다. 질소와 수소의 화합물인 히드라진이 화성 비행로봇에 적절한 연료로 거론되고 있다. 결국 정찰이나 탐사를 뛰어넘어 인간을 수송하고 종국엔 거주하게 만드는 비행로봇을 개발하는 것이 미래 우주로봇의 핵심 개념이다.
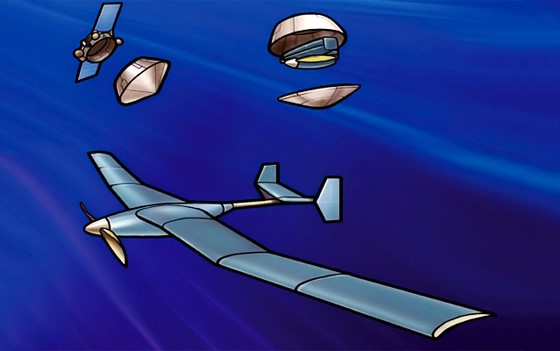
NASA의 미래형 화성 로봇. 비행체 형태.
'C.E.O 경영 자료' 카테고리의 다른 글
| 사람 닮은 로봇 휴머노이드…가장 어려운 건 두 발로 걷기 (0) | 2015.08.09 |
|---|---|
| 중국과 미국 항모 전단이 붙는다면 어떻게 될까? (0) | 2015.08.09 |
| 입찰담합 건설사도 특별사면 검토 (0) | 2015.08.08 |
| 급증하는 모바일 결제시장, 글로벌 기업들이 몰려온다 (0) | 2015.08.08 |
| 나는 비판 듣기를 정말 좋아한다 (0) | 2015.08.07 |